HumanoidBatteryProject
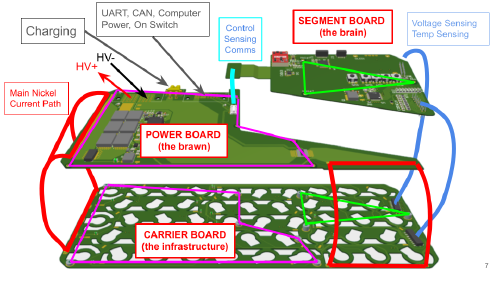
My time as an MEng student with the MIT Biomimetics lab has been very focused on understanding the design of battery packs for legged robots. The implementation of batteries in highly dynamic robots is distinctly different from traditional battery use cases such as in electric vehicles.
Read More